Object Detection api
Para este proyecto estamos usando una api basada en tensorflow para la deteccion de objetos en object-detection-api el cual viene acompañado de unos tutoriales de instalacion y uso.
Tutorial
Siguiendo los pasos de instalación con una variación al instalarlo en windows podemos llegar a obtener los siguientes resultados:

Aqui vamos a incluir los pasos que yo hice para instalarlo en windows con maquina virtual de linux…….(Proximamente)
Red convolucional
Estas son redes que generalmente se usan para procesar imagenes y estan basada en operaciones de convolucion.
las redes se componen de tres tipos de capas:
- capas de convolucion : Consisten en filtrar una imagen usando máscaras aprendidas por la misma red
- Una capa de pooling o de reducción: la cual va a reducir la cantidad de parámetros al quedarse con las características más comunes.
- Capas totalmente conectadas, las cuales se encargan de hacer la clasificacion final.
Faster R-CNN
La Faster R-CNN es una red neuronal optimizada en la que podemos hacer tanto la clasificacion como la localizacion de objetos implementando en la etapa final dos redes neuronales que a partir de el ultimo mapa de caracteristicas obtenidas de las capas
de convolucion y pooling, se entrena una para hacer la localizacion llamada Region proposal network, a partir de estas
localizaciones y el mapa de caracteristicas entrenamos otra red para hacer la clasificacion de los objetos localizados.
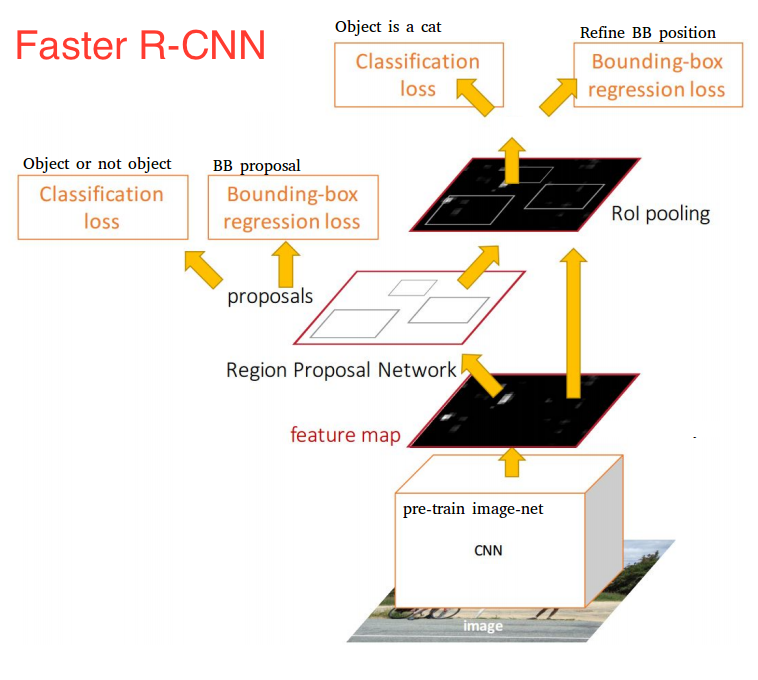
Para el caso de este proyecto usamos un modelo pre-entrenado, en el cual podemos hacer ajustes en los parametros de algunos elementos de la red que los podemos encontrar en la configuracion del modelo aqui
Generando Imagenes
Dado el poco conociemiento para generar imagenes con calidad, lo que hice a continuacion fue descargar unas imagenes “.png” de mis objetos a reconocer y unos paisajes “.jpg” en donde pondremos nuestros objetos.
Estas son una de las imagenes descargadas.
Objeto:

Entorno:

Segmento de codigo en el que generamos la imagen y el marcado (Codigo Completo)
for i in range(1,5):
habitat = "viboras/h" + str(i) + ".jpg"
print(habitat)
image = Image.open(habitat)#.convert("RGBA")
for j in range(1,6):
vibora = "viboras/vib" + str(j) + ".png"
print(vibora)
vib = Image.open(vibora).convert("RGBA")
name.text = "vib" + str(j)
for k in range(10):
size = np.random.randint(70,130)
r = size/float(vib.width)
sizeheight = int(vib.height * r)
#vib = vib.rotate(np.random.randint(180))
vib = vib.resize((size,sizeheight),Image.ANTIALIAS)
image_copy = image.copy()
width.text = str(image_copy.width)
height.text = str(image_copy.height)
posw = np.random.randint((image_copy.width - vib.width))
xmin.text = str(posw)
xmax.text = str(posw + vib.width)
posh = np.random.randint((image_copy.height - vib.height))
ymin.text = str(posh)
ymax.text = str(posh + vib.height)
position = (posw, posh)
image_copy.paste(vib, position,vib)
new_name = "viboras_" + str(i) + "_" + str(j) +"_"+ str(k)+ ".jpg"
filename.text = new_name
path.text = c + new_name
new_namexml = "viboras_" + str(i) + "_" + str(j) +"_"+ str(k)+ ".xml"
image_copy.save(new_name)
tree.write(new_namexml)
Archivo xml producido con codigo antes descrito con la informacion de la imagen y el marcaje del objeto:
<annotation>
<folder>fotos redes</folder>
<filename>viboras_2_5_3.jpg</filename>
<path>C:\Users\alexi\Downloads\fotos redes\viboras_2_5_3.jpg</path>
<source>
<database>Viboras</database>
</source>
<size>
<width>660</width>
<height>440</height>
<depth>3</depth>
</size>
<segmented>0</segmented>
<object>
<name>vib5</name>
<pose>Unspecified</pose>
<truncated>0</truncated>
<difficult>0</difficult>
<bndbox>
<xmin>57</xmin>
<ymin>225</ymin>
<xmax>137</xmax>
<ymax>282</ymax>
</bndbox>
</object>
</annotation>
Y estos son algunos de los resultados obtenidos al correr el codigo…no muy buenos pero creo que pueden funcionar:


separamos los datos generados en dos partes uno para el entrenamiento y otro para las pruebas, en una proporcion 90% entrenamiento, 10% pruebas aproximadamente.
una vez generado el marcaje y separado los datos hay que generar los archivos TFRecords para esto primero debemos convertir nuestros XML a un archivo CSV para despues este poderlo convertir en un TFRecords para este usamos algunos codigos de datitran-github haciendole unas pequeñas modificaciones para nuestro caso.
Usamos primero xml_to_csv.pytratando de obtener una estructura como la siguiente:
Object-Detection
-data/
--test_labels.csv
--train_labels.csv
-images/
--test/
---testingimages.jpg
--train/
---testingimages.jpg
--...yourimages.jpg
-training
-xml_to_csv.py
y una vez construido nuestros archivos vamos a usar otro codigo llamado generate_tfrecord.py en el que solo vamos a modificar el numero y nombre de nuestras clases en mi caso 5.
#Remplazar por el nombre de sus clases y añadir en caso de tener mas
def class_text_to_int(row_label):
if row_label == 'clase1':
return 1
if row_label == 'clase2':
return 2
if row_label == 'clase3':
return
if row_label == 'clase4':
return 4
if row_label == 'clase5':
return 5
else:
None
ahora suponiendo que ya tenemos la instalacion de la object-detection api vamos a correr nuestro script generate_tfrecord.py
python generate_tfrecord.py –csv_input=data/train_labels.csv –output_path=data/train.record
python generate_tfrecord.py –csv_input=data/test_labels.csv –output_path=data/test.record
una ves hecho esto ya tenemos creado nuestros records para la prueba y el entrenamiento.
Pasos para hacer el entrenamiento
Para iniciar el entrenamiento y hacer esto un poco mas rapido vamos a tomar un modelo pre-entrenado obtenido con el siguiente comando:
-wget http://download.tensorflow.org/models/object_detection/ssd_mobilenet_v1_coco_11_06_2017.tar.gz
una vez teniendo este en nuestra carpeta vamos a copiar el archivo para hacer configuracion del modelo para nuestro que se encuentra en la carpeta de object_detection/samples/configs/ssd_mobilenet_v1_pets.config en el que vamos a modificar algunas cosas comentadas aqui
ahora en nuestra carpeta training vamos a poner la configuracion modificada y vamos a crear el object-detection.pbtxt con el siguiente contenido dependiendo del num de clases del proyecto:
item {
id: 1
name: 'vib1'
}
item {
id: 2
name: 'vib2'
}
.
.
.
ya con esto estamos listos para entrenar copiamos las carpetas data, images y training en la carpeta object-detection de la api
y corremos el siguiente comando y listo
#from models/research/object-detection python train.py –logtosderr –train_dir=training/ –pipeline_config_path=training/ssd_mobilenet_v1_pets.config
y despues este para checar el procedimiento
tensorboard –logdir=training/
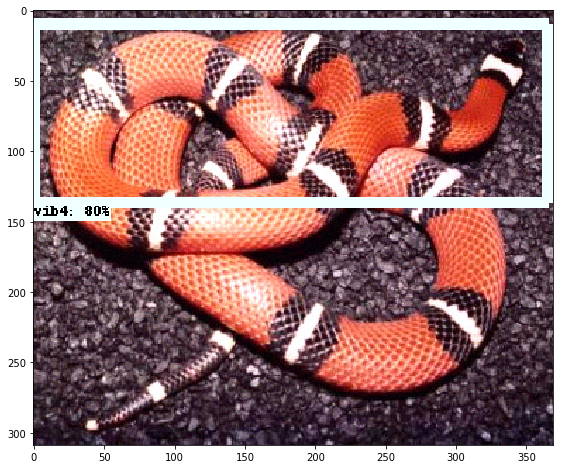
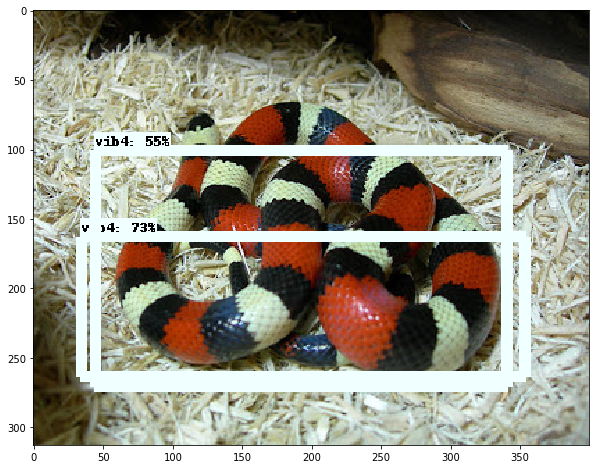
Resultados con los datos de entrenamiento


Resultados con datos externos
Estas son imagenes extraidas de internet en las cuales podemos ver que la red funciona bien pero dada la construccion de los datos de entrenamiento en donde todas las vivoras son enrolladas tiene algunos problemas al identificar algunas curvas tanto como para identificar dos objetos como podemos ver.